
在开放水域,环境边界不固定、要素高度动态(风浪流、漂浮物、渔网、来船去船),与公路自动驾驶的“有车道线、强规则”不同。海穹平台正是在这样的约束下,面向无人船的 L4 级自主航行给出了一套工程化解法:从多源感知到决策控制,从云边协同到运维闭环,让无人船在真实海况里“稳、准、可控”。
1.为什么水上更难:三类核心挑战
感知不稳定:浪花反光、雾雨变天、目标尺度跨度大(浮标到小艇),单一传感器易失效。
定位易漂移:GNSS 在码头遮挡、桥区多径明显,磁罗盘受干扰,纯惯导又易漂。
规则更复杂:来路不一、航速差大、目标轨迹随机,路径与避障需实时再规划。
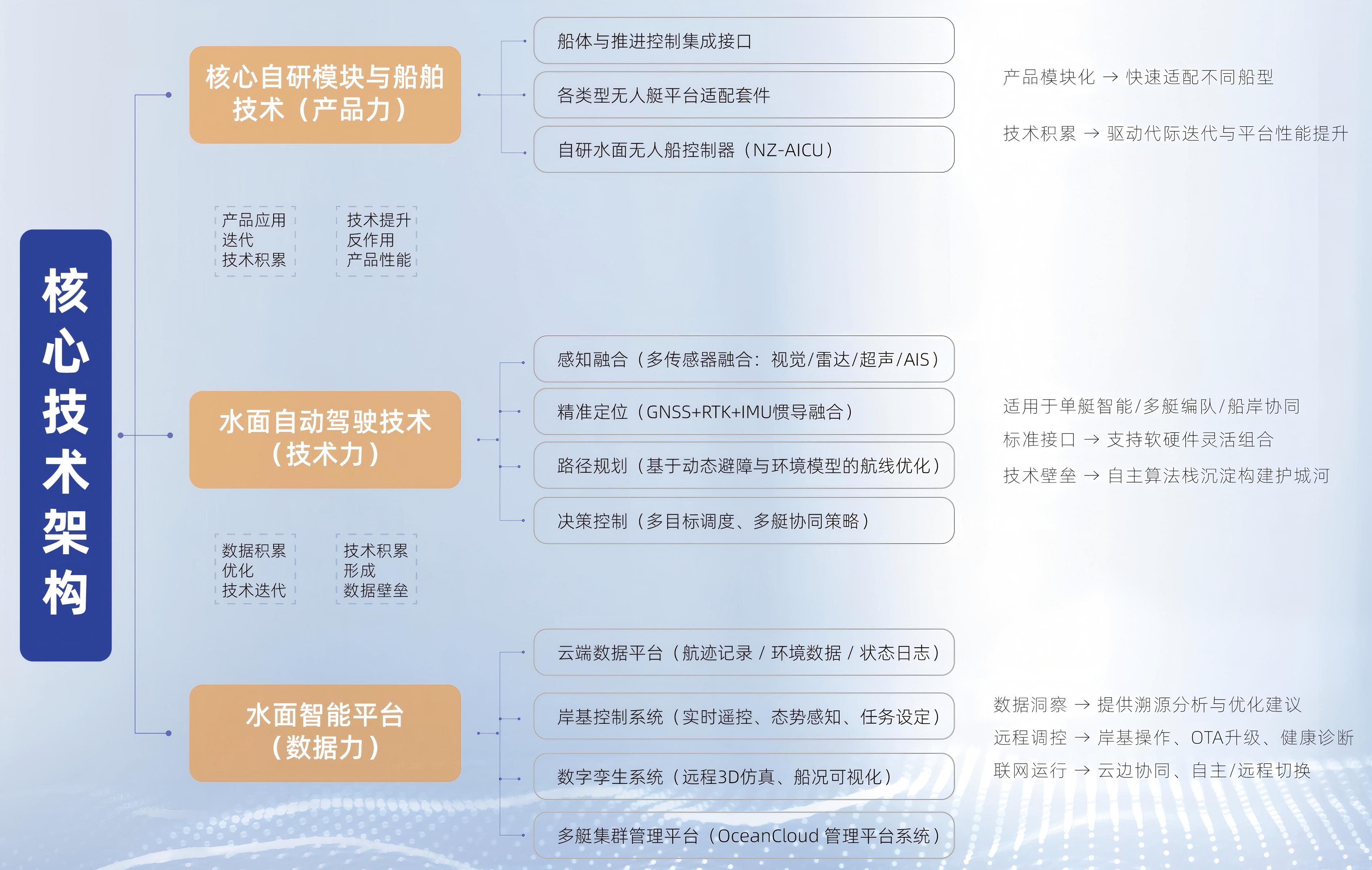
2.海穹平台总体架构(从水面到云)
载体层(无人船/作业模块) → 船载计算层(NZ-AICU) → 感知层(视觉/雷达/声呐/AIS) → 融合与定位(GNSS+RTK+IMU) → 规划与决策(行为/路径/避障) → 控制与执行(航向/姿态/推进) → 通信与云(4G/5G/自组网/卫星 + OceanCloud) → 运维与安全(健康监测、远程接管、断链返航、OTA)。
一船三系统(NZ-VCS-A 自主航行、NZ-VCS-S 辅助驾驶、Feeder-OS 投喂作业)+ OceanCloud 云端中台。
3.多源感知:让“看见”更可靠 构建多模态融合感知系统:毫米波雷达 + 摄像头 + 激光雷达 + AIS数据
融合多传感器的感知画面,建立特征融合与检测模块,实现周围数据的融合输出。弥补单一传感器的缺陷,提高感知模块的的抗干扰能力,可多维度的感知周边信息,同时保证周围信息的准确性。自研海杂波时频抑制算法(信噪比提升40dB,浪高3m环境检出率>99%)实现目标识别准确率≥95%,障碍检测速率>2Hz。
4.高精定位与状态估计:把“走直”变成能力
基于目标、环境与碰撞风险评估,实时规划满足安全、规则与效率的避让路径。
即使在驾驶员未及时处置(疲劳、恶劣环境等)情况下,系统也能按规划自动行驶。
自主避让规划成功率>90%,规划频率≥2 Hz;填补国内相关技术空白。
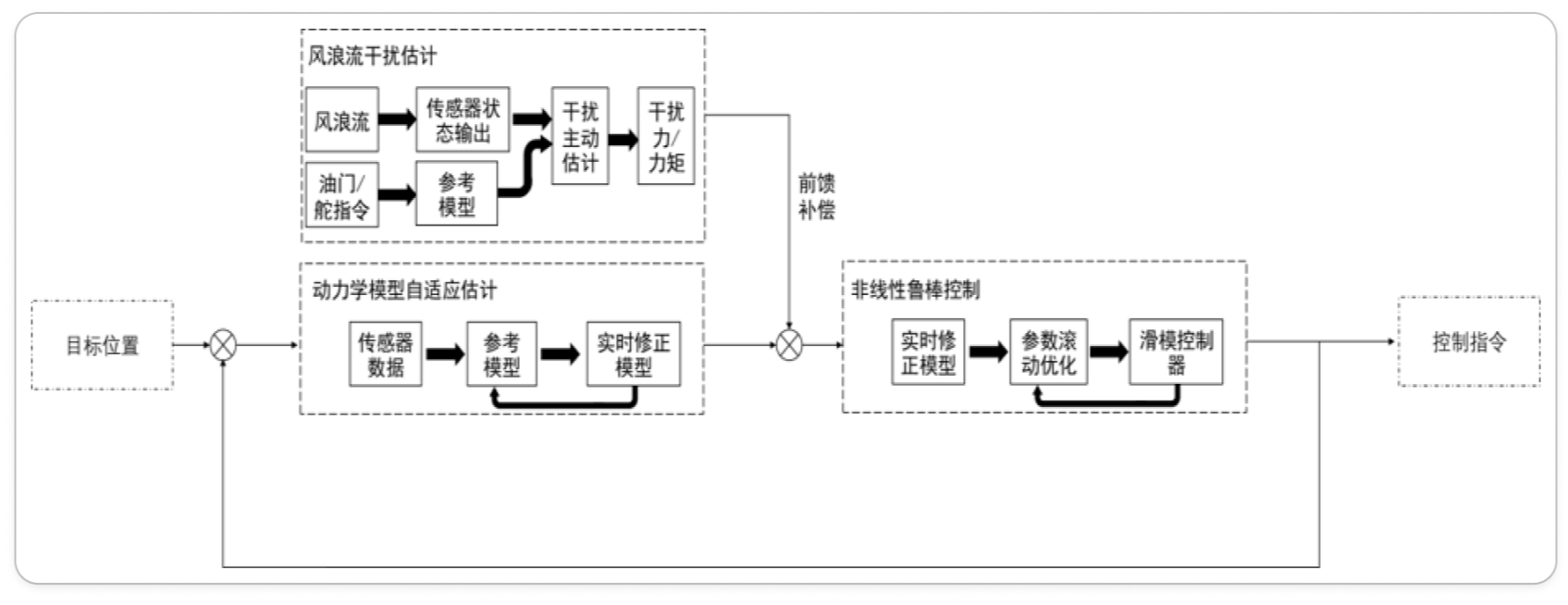
技术支撑
多源融合感知:融合风速仪、陀螺仪、GNSS、水流传感器等,实时感知环境变化。
在线干扰估计:实时估计风速、浪涌、水流等主要干扰。
前馈补偿控制:将估计结果引入控制器,前馈补偿环境干扰。
鲁棒性提升:在风浪等复杂工况下保持航向稳定与路径跟踪精度,显著提升环境适应性与鲁棒性。
5.场景构建与环境理解:从“点目标”到“可通行带”
占据栅格 :将多源点云/图像转成统一可规划空间表示;
动态目标轨迹外推:对来船/浮标/漂浮物建模,预测未来若干秒的可行路径;
数字孪生与底图:把航道、网箱、禁行区等“静态约束”预先纳入,减少临场试错。
6.安全冗余与功能安全:工程可运行的底线
三模无扰切换:自主 / 人工 / 遥控即时切换,状态与控制权平滑移交;
失联保护:链路质量退化 → 进入限速/限距 → 断链自动返航;
健康监测:推进/转向/电源冗余,故障自诊断与降级策略;
远程“强制接管/熄火”:极端场景下由岸基一键介入,防止次生风险。
7.云边协同与运维闭环:从“可跑”到“可管”
OceanCloud:统一任务调度、设备监控、数据管理、远程运维与 OTA 升级;
数字孪生:态势总览、航迹回放、3D 仿真推演,支持演练与复盘;
数据资产化:作业日志/环境数据/故障记录沉淀为数据资产,用于训练与运维决策;
对外接口:对接园区/监管/指挥平台(视频/告警/轨迹/报表),支持私有化与专网部署。
8.典型性能与工程口径(以无人巡逻船为例)
航速/续航:平台可在 30 节最高航速、约 200 海里续航的载体上运行(视动力与海况);
通信:4G/5G + 自组网(可扩展卫星),岸船链路典型 ~20 km;
控制精度:±10 cm 级轨迹控制、≤1 m 稳态误差、≈4.8 m 定点悬停(典型海况)。
9.展望:从“单艇智能”到“群体智能”
协同感知:多艇互通目标与环境模型,提升远距离与遮挡场景探测率;
自适应策略学习:基于真实作业反馈的在线微调与“少样本”适配;
绿色运营:能耗感知与航速/航线联合优化,面向 ESG 与双碳指标可度量。
海穹平台以“多源感知 + 高精定位 + 分层规划 + 稳态控制 + 云边协同”为骨架,把无人船的 L4 自主航行从“可演示”推向“可运营”。 如果你正面临渔业、安防或运维场景的规模化与全天候挑战,欢迎预约一次 实海域演示,用真实数据说话。



{kind=link}
{kind=link}